Se sei interessato a una spiegazione più visiva e meno tecnica del rientro e dell'atterraggio dello Space Shuttle, ho tenuto una conferenza dal titolo Come far atterrare lo Space Shuttle ... dallo spazio al meetup di Stack Overflow nell'ottobre 2016.
Non ho notato questa domanda fino a un paio di giorni fa, ma come qualcuno con una malsana ossessione per nello specifico le fasi di ingresso e atterraggio dei voli navetta, posso dire che ci sono molte informazioni effettivamente errate nelle altre risposte qui. Fammi vedere se riesco a spiegarlo meglio.
Innanzitutto, le due semplici domande, a cui hanno risposto bene altre domande, ma le includerò anche qui per completezza:
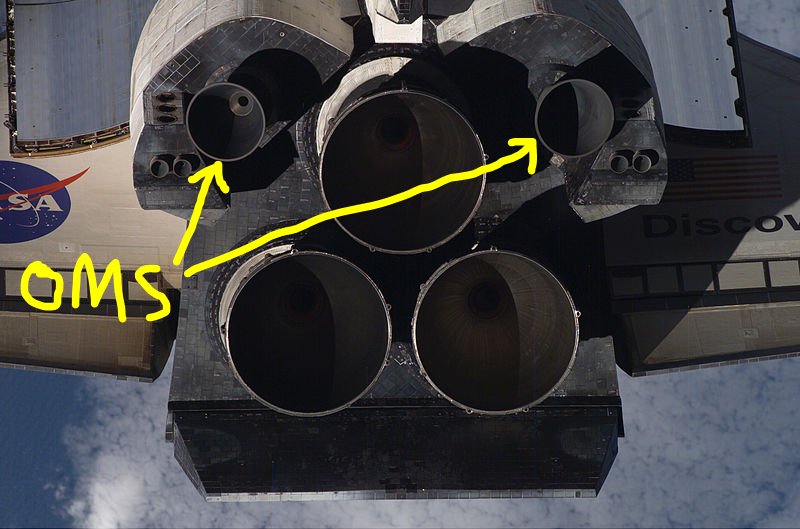
- La navetta potrebbe effettuare un riattaccata? No. I motori OMS sono troppo deboli per fare la differenza nell'atmosfera e i motori principali (che sarebbero abbastanza potente) sono alimentati solo dal serbatoio esterno arancione che viene gettato in mare dopo il lancio.
- Dove è atterrato? 78 missioni sono atterrate al Kennedy Space Center, 54 (inclusa la prima ) presso Edwards Air Force Base e 1 presso White Sands. C'erano altri siti di atterraggio designati per le emergenze, ma nessuno è mai stato utilizzato.
Ora, per la questione davvero di come la navetta fosse rientrata ed atterrata.
La fonte principale che citerò in questa risposta è la Guida all'entrata, TAEM e guida all'approccio / atterraggio 21002 , che era una cartella di lavoro usata per addestrare gli astronauti. Purtroppo, non ho un collegamento ad esso, ma può essere ottenuto da nasaspaceflight.com tramite un abbonamento L2 se sei veramente interessato. Abbrevierò questa fonte come ETAGW.
Meccanica orbitale
Primo, una lezione molto rapida di meccanica orbitale. Per modificare l'altitudine della tua orbita, devi modificare la velocità ($ \ Delta v $). Se aumenti la velocità, aumenterai l'altitudine e se diminuisci la velocità, diminuirai l'altitudine. Tuttavia, questo effetto è più pronunciato a 180 ° dalla posizione in cui è stata apportata la modifica. Dopo un'orbita completa di 360 °, ti troverai approssimativamente alla stessa altitudine da cui sei partito.
Questo illustra l'effetto:

Partendo dall'orbita circolare (nera), se rallenti nel punto A, potresti finire con qualcosa come l'orbita rossa, e se acceleri potresti finire con qualcosa come l'orbita blu.
Deorbit Burn
A causa della natura della meccanica orbitale, come descritto sopra, si desidera eseguire la manovra di deorbit sul lato opposto del pianeta rispetto al luogo di atterraggio previsto. Ciò si è verificato tipicamente sull'Oceano Indiano per un atterraggio al Kennedy Space Center in Florida.
L'ustione stessa è stata eseguita con la coda volante della navetta prima e il lato bianco (superiore) rivolto verso la Terra (scudo termico / nero lato rivolto verso lo spazio). I due motori OMS (sistema di manovra orbitale) sono stati utilizzati per realizzare il $ \ Delta v $ richiesto (ovunque tra 200 e 550 piedi / sec a seconda dell'altitudine di partenza). L'ustione richiedeva tipicamente da 2,5 a 3 minuti. Ciò abbasserebbe il perigeo (punto più basso in un'orbita attorno alla Terra) entro poche miglia dal suolo (avendo difficoltà a trovare una fonte, ma mi sembra di ricordare che si trova a circa 30-40 miglia), il che era sufficiente per garantire il percorso orbitale li porterebbe in un'atmosfera densa.
 Fonte immagine
Fonte immagine
I motori OMS sono essenzialmente versioni più grandi dei jet RCS (sistema di controllo della reazione). I getti RCS sono stati utilizzati per i cambiamenti di rotazione (assetto) e piccola traslazione (velocità in una data direzione). Gli OMS sono stati utilizzati per apportare modifiche orbitali.
Entrambi i sistemi hanno bruciato la stessa miscela ipergolica (monometilidrazina (MMH) e tetrossido di diazoto (N2O4)). Se l'OMS avesse fallito, i jet RCS avrebbero potuto, in teoria, essere utilizzati per rallentare lo shuttle abbastanza per il rientro.
Nose Flip
Alcune risposte hanno detto che l'orbiter avrebbe beccato giù 140 ° per il ribaltamento. Questo non è corretto. Dopo che la manovra di deorbit è stata completata, l'orbiter si inclinava su di circa 220 ° fino a raggiungere un angolo di attacco di 40 ° (indicato come "atteggiamento EI -5" perché devono essere in quell'atteggiamento almeno cinque minuti prima dell'interfaccia di ingresso).
Hanno circa 20 minuti tra l'ustione da deorbit e l'EI-5, quindi c'è tutto il tempo per lanciare in entrambe le direzioni. Probabilmente era preferibile il muso in alto perché le prese d'aria di scarico dell ' APU sono rivolte verso l'alto vicino alla coda. Ciò fa naturalmente sì che l'orbiter voglia alzarsi quando le APU sono in funzione.
Durante questo pitch-up, sparerebbero i jet RCS avanti per scaricare tutto il carburante in avanti, a meno che non fosse richiesto per ragioni di baricentro. I jet RCS anteriori non sono stati utilizzati durante il rientro e scaricare il carburante riduce i potenziali pericoli per gli astronauti.
Una volta in posizione, inizierebbe la guida di ingresso ad anello aperto, mantenendo l'orbiter a 0 ° di rollio (ali livello), 0 ° di imbardata e angolo di attacco di 40 ° (alfa).
Interfaccia di ingresso
La NASA definisce l'interfaccia di ingresso (EI) come un'altitudine di 400.000 piedi. Non c'è un limite duro nell'atmosfera, ma è intorno all'altitudine in cui i suoi effetti iniziano a diventare direttamente rilevabili.
Virate a S
Alcune risposte hanno affermato che lo shuttle usava S -gira allo scopo di rallentare. Questa è una spiegazione molto comune, ma eccessivamente semplificata e probabilmente imprecisa.
"La prossima volta che senti qualcuno parlare della navetta che esegue inversioni di rollio per scaricare l'energia, non ascoltare. La navetta esegue inversioni di rollio perché ha un inviluppo alfa molto piccolo. " - ETAGW 2.8.1 (l'enfasi è dalla fonte originale)
Come con qualsiasi aereo, le ali dello shuttle generano portanza. Man mano che l'atmosfera diventa più densa, le ali genereranno più portanza e questa portanza verso l'alto farà rallentare la velocità di discesa. In effetti, se la navetta avesse mantenuto l'assetto a livello delle ali, alla fine avrebbe iniziato a guadagnare quota facendola "saltare" attraverso l'atmosfera diverse volte finché non fosse abbastanza lenta da cadere. E anche se tecnicamente sarebbe possibile saltare il rientro, sarebbe molto difficile controllarlo con precisione.
Quindi, invece, quando la velocità decente inizia a rallentare, lo shuttle va in banca. Controllando l'angolo di inclinazione, sono in grado di controllare la portanza verso l'alto generata dalle ali e, per estensione, controllare la loro velocità di discesa.
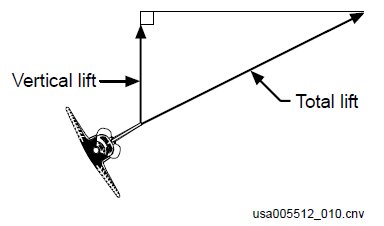
ETAGW Figura 2-5 che illustra il vettore dell'ascensore.
Oppure, con il vettore dell'ascensore puntato lateralmente anziché verso l'alto, lo shuttle inizierà girare. A causa dell'incredibile velocità, il raggio di virata è enorme, ma gira comunque gradualmente e l'orbiter sviluppa un errore azimutale (la differenza tra la direzione corrente dell'orbiter e la direzione verso il sito di atterraggio).
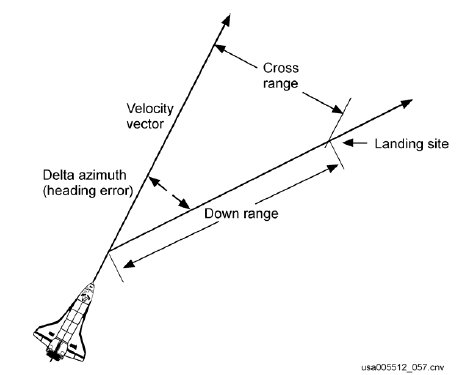
ETAGW Figura 2-3 che illustra l'errore di azimut.
Per correggere questo errore di azimut ($ \ Delta z $), l'orbiter esegue "inversioni di rollio". In altre parole, gira nell'altra direzione. Queste svolte creano il caratteristico percorso di rientro della svolta a S.
La prima inversione avviene sempre a 10,5 ° $ \ Delta z $. Successive inversioni si verificano a 17,5 ° fino a Mach 4, quando inizia a scendere a 10 ° a Mach 3.
Nota: tutti i numeri di mach dati ovunque in questa risposta, o citati ovunque nei materiali dello Space Shuttle, non sono veri numeri di mach. La NASA usa 1000 piedi / sec come approssimazione di Mach 1, e tutti i numeri di Mach sono multipli di quella velocità.
Distanza
Ovviamente, l'obiettivo finale del rientro è per raggiungere la pista prevista a una velocità appropriata per l'atterraggio. Sebbene l'orbiter non abbia alcun motore per aiutare a raggiungere questo obiettivo, ha un'enorme quantità di energia orbitale. Pertanto l'obiettivo diventa la gestione dell'energia e, più specificamente, la gestione della resistenza.
L'orbiter ha due modi per influenzare la resistenza durante l'ingresso: cambiare l'angolo di attacco (alfa) e cambiare l'angolo di inclinazione.
L'angolo di attacco è il modo più rapido per aumentare o diminuire la resistenza, ma all'orbiter era consentito solo deviare di ± 3 ° dall'alfa nominale (40 ° per la maggior parte dell'entrata). Questa è la "busta alfa molto piccola" a cui si fa riferimento in precedenza. La limitazione è progettata per garantire un'adeguata protezione dal calore e mantenere il controllo del veicolo.
La modifica dell'angolo di inclinazione, come descritto sopra, consente di controllare la velocità di discesa. Un angolo di inclinazione più ripido comporterà il raggiungimento di un'aria più densa più velocemente e quindi si tradurrà in una maggiore resistenza. Un angolo di inclinazione inferiore manterrà l'orbiter nell'aria più rarefatta più a lungo e si tradurrà in una minore resistenza. Tuttavia, è necessario un po 'più di tempo per vedere l'effetto di un cambio di banco rispetto a un cambio di alfa.
Ci sono anche limitazioni dell'angolo di inclinazione perché, ancora una volta, non vuoi saltare fuori dall'atmosfera e non vuoi cadere nell'aria densa così velocemente da superare la resistenza massima che il veicolo può sopportare, ma è un inviluppo più grande dei limiti alfa. Infatti, nelle prime fasi di ingresso, l'orbiter potrebbe anche essere volato sottosopra (con il suo vettore di portanza puntato verso la Terra) se necessario a causa di una bruciatura insufficiente a seguito di un malfunzionamento durante l'ustione da deorbit.
Fasi di orientamento all'ingresso
Non entrerò nei dettagli sulla guida all'ingresso, ma dirò che le considerazioni principali cambiano al variare della velocità e dell'altitudine e la guida all'ingresso è suddivisa in fasi per riflettere questo.
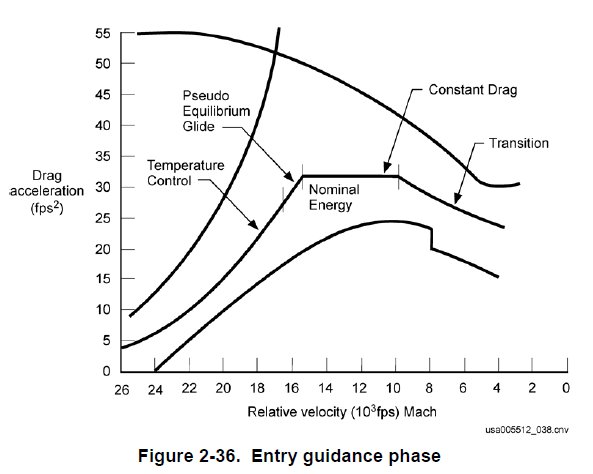
ETAGW
Nel grafico sopra, la linea centrale rappresenta il profilo nominale. La linea più bassa è il profilo di "planata di equilibrio" che è la quantità minima di resistenza che l'orbiter deve mantenere per evitare di guadagnare quota e saltare. La linea in alto a sinistra rappresenta un limite termico (se l'orbiter lo supera, potrebbe bruciarsi). La linea in alto a destra rappresenta un limite di pressione dinamica (se l'orbiter lo supera, potrebbe rompersi a causa delle forze aerodinamiche).
- Preentry : questo è considerato guida a ciclo aperto perché tutto ciò che fa mantiene 0 ° imbardata, 0 ° rollio e 40 ° alfa fino a quando il fattore di carico totale diventa 0,132 g (circa 3 piedi / sec 2 di resistenza), al quale punto di guida a circuito chiuso inizia.
- Controllo della temperatura : inizia con guida a circuito chiuso e termina a una velocità di Mach 19. Cerca di mantenere una temperatura costante entro i limiti di progetto del orbiter.
- Equilibrium Glide : fornisce semplicemente un ponte tra il controllo della temperatura e le fasi di resistenza costante. Termina quando il trascinamento raggiunge i 33 piedi / sec 2 . È chiamato così perché la sua forma è simile a quella del profilo di planata di equilibrio.
- Constant Drag : mantiene una velocità di trascinamento costante di 33 ft / sec 2 sup> fino a quando la velocità raggiunge Mach 10.5.
- Transizione : progettata per passare dall'elevata resistenza aerodinamica e alto alfa di entrata alla resistenza inferiore e all'alfa inferiore richieste dall'orbiter per volare di più come un aeroplano. Questa fase termina a Mach 2.5 quando inizia TAEM.
TAEM
TAEM è l'acronimo di Terminal Area Energy Management. L'obiettivo in questa fase è allineare l'orbiter alla pista con la giusta quantità di energia per il suo avvicinamento finale. Anche in questo caso, non entrerò nei dettagli (sentiti libero di fare altre domande se vuoi), ma ecco il succo:
Se tutto è andato bene nella fase di ingresso, TAEM inizierà a circa 82.000 piedi e 60 miglia nautiche dalla pista (percorso a terra previsto, non distanza in linea retta).
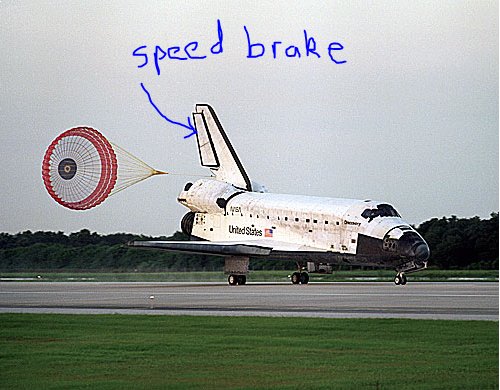
Mentre la guida all'ingresso utilizza principalmente l'angolo di inclinazione per gestire l'energia, TAEM utilizza principalmente l'angolo di attacco. Al di sotto di Mach 1, lo speedbrake (un timone diviso) aiuta anche con la gestione dell'energia.
Fonte: NASA
Fasi di TAEM:
- S-Turn : di solito non richiesta, ma lo shuttle eseguirà virate a S se l'energia è troppo alta all'inizio del TAEM (troppo alta o troppo vicina alla pista).
- Acquisizione : ruota l'orbiter verso una punto di tangenza sul cono di allineamento della rotta (HAC) e quindi vola a livello delle ali fino a quando non intercetta l'HAC. Il punto di tangenza è indicato come "waypoint 1" (WP1). Durante questa fase, l'orbiter rallenta fino a Mach 1, a quel punto il comandante prende CSS (control-stick steering), che è la cosa più vicina che lo shuttle ha a una modalità "manuale".
- Allineamento della rotta : guida l'orbiter attorno a un "cono" virtuale (vedi diagramma sotto) finché non è allineato con la pista. Non è veramente un cono, matematicamente parlando, ma è il modo più semplice per visualizzarlo.
- Prefinale : stabilisce l'orbiter sulla pendenza di planata esterna.

ETAGW Figura 3-13 che illustra l'HAC.
Avvicinamento e atterraggio
La fase di guida finale si chiama "Avvicinamento e atterraggio". Inizia quando l'orbiter si trova al di sotto di 10.000 piedi e si trova sulla pendenza di planata esterna (OGS), ma non oltre 5000 piedi indipendentemente dalla pendenza di planata.
L'OGS era una pendenza di planata di 20 ° per "luce" orbitatori (peso lordo inferiore a 222.000 libbre) o 18 ° per orbitanti "pesanti" (in confronto, i normali aeroplani usano una pendenza di planata di 3 °). Pesante o leggero dipendeva da cosa c'era nella baia di carico. Il punto di mira nominale per l'OGS era di 7500 piedi al di sotto della soglia della pista, ma c'era anche un punto di mira "ravvicinato" a 6500 piedi che veniva utilizzato in caso di vento contrario abbastanza forte.
Il freno di velocità è stato utilizzato per mantenere 300 KEAS ( nodi di velocità equivalente - è effettivamente la stessa velocità indicata) sull'OGS fino a 3000 piedi, momento in cui ha calcolato quanto freno di velocità dovrebbe essere richiesto per l'atterraggio e si è trasferito in quella posizione. Si ricalcolerebbe ancora una volta a 500 piedi.
A 2000 piedi, l'orbiter inizierebbe una manovra "preflare" progettata per la transizione dall'OGS alla bassa pendenza interna di planata di 1,5 ° (IGS). Ciò è stato ottenuto con un pull-up circolare seguito da un decadimento esponenziale sull'IGS.

ETAGW Figura 4-8 che illustra la geometria preflare.
In realtà, l'IGS non viene seguito a lungo ed è più una guida per assicurarsi di attraversare la soglia della pista sulla traiettoria corretta e ottenere in posizione per iniziare il bagliore finale, che è essenzialmente lo stesso di un bagliore di atterraggio convenzionale in un normale aereo, tranne per il fatto che la navetta atterra con un angolo di attacco molto più alto (circa 8 °) a causa delle sue ali delta (più simili al Concorde ).
Il carrello di atterraggio è stato schierato a 300 piedi e, se sei interessato al carrello di atterraggio, ho scritto una risposta completa sull'utilizzo del carrello di atterraggio una volta.
Il punto di atterraggio mirato si trovava a 2500 piedi lungo la pista a una velocità relativa di 195 nodi per gli orbitatori leggeri o 205 nodi per i pesanti (entro + 5 / -10 nodi).
Lo scivolo di trascinamento (un aggiunta fatta all'inizio degli anni '90) sarebbero stati schierati poco dopo l'atterraggio della marcia principale, ma non più velocemente di 195 nodi, e talvolta avrebbero aspettato fino all'atterraggio della marcia anteriore se ci fosse un vento laterale. Sarebbe stato gettato a 60 nodi per garantire che il meccanismo di attacco dello scivolo non colpisse e danneggiasse i motori principali.
Controllo
(ad esempio, come è stato in grado lo shuttle di modificare l'assetto? )
All'inizio, l'orbiter è ancora controllato come un veicolo spaziale, utilizzando i jet RCS per controllare l'assetto. All'aumentare della pressione dinamica (q-bar), le superfici aerodinamiche iniziano ad attivarsi e i getti RCS si arrestano come segue:
- q-bar = 0,5 libbre / piedi 2 sup > (psf), gli elevoni iniziano a fungere da trim.
- q-bar = 2 psf, gli elevoni iniziano ad agire come superfici di controllo attive.
- q-bar = 10 psf, i getti di rollio RCS sono disabilitati.
- q-bar = 40 psf, i getti di pitch RCS sono disabilitati.
- Mach 10, lo speedbrake si apre su un programma programmato per agire come trim di beccheggio.
- Mach 5, il timone diventa attivo, inizialmente agendo principalmente come trim degli alettoni.
- Mach 1, i getti di imbardata RCS sono disabilitati.
Navigazione
(ad es. come faceva lo shuttle a sapere dove si trovava?)
Navigare, in termini NASA, significa fondamentalmente sapere dove ti trovi (la guida risponde al domanda "come faccio ad arrivare dove voglio andare?"). Durante l'entrata, lo shuttle utilizzava principalmente unità di navigazione inerziali, che erano state allineate utilizzando un localizzatore di stelle prima della combustione di deorbit. Man mano che si avvicinava al sito di atterraggio, poteva anche incorporare segnali GPS e / o TACAN nei dati di navigazione. OV-105 (noto anche come Space Shuttle Endeavour) aveva tre unità GPS installate e nessun TACAN, mentre gli altri orbiter avevano tre TACAN e un'unità GPS.
Sull'HAC, ovunque da circa 15k a 20k piedi di altitudine, l'orbiter rileva il sistema di atterraggio a microonde (MLS), che si comporta come un ILS ad altissima precisione. Da questo, sono in grado di determinare la loro posizione con elevata precisione e accuratezza. Una volta acquisito, questo diventa la fonte principale di dati di navigazione per il resto del volo.
Nei video di atterraggio, puoi effettivamente vedere esattamente quando rilevano MLS perché il nastro dell'altitudine passa dall'essere una specie di scatti, poi salta un po 'e diventa liscia. Ad esempio, guarda qui a circa 20 km (il nastro dell'altitudine è quello sulla destra).
Sotto i 5000 piedi, l'orbiter era anche in grado di utilizzare un radar altimetro per informazioni sull'altitudine.
Probabilmente sono più informazioni di quelle che stavi cercando, ma se hai domande su cose che non ho trattato o su cui non sono entrato abbastanza nei dettagli, non esitare a chiedere domande separate per quelle.